
这两年,具身智能很热。
大模型让机器人更会理解任务,视觉模型让机器人更会看,运动控制让机器人更会走。但真正到了真实场景里,一个问题很快会暴露出来:机器人如果只能“到达”,却不能稳定地“操作”,很多任务仍然完成不了。
拿起一个杯子、拧开一个瓶盖、插入一个零件、整理一堆形状不同的物品,这些动作在人类看来很普通,但对机器人来说并不简单。
所以,灵巧手正在成为具身智能产业里越来越关键的一环。
近期受到关注的机器人灵巧手初创企业「伯牙智能」,切入的正是这个方向。公开信息显示,伯牙智能聚焦机器人灵巧手与灵巧操作技术,围绕硬件本体、操作算法和训练平台布局,并发布了“高山 S1”灵巧手以及“天琴”灵巧操作全栈平台。
如果说大模型解决的是“机器人知道要做什么”,那灵巧手要解决的就是“机器人到底能不能把这件事做成”。

01 具身智能的瓶颈,往往卡在手上
机器人要进入真实世界,不能只停留在语音对话、路线导航和简单搬运。
真正高频的工作,通常是细碎、非标准、充满变化的:
- 工厂里,零件尺寸、位置、角度会变化;
- 商业场景里,商品包装、摆放状态不完全一致;
- 家庭环境里,物体更杂乱,任务更随机;
- 服务场景里,机器人还要和人、物、空间持续交互。
这些任务最后都会落到一个动作上:操作。
能不能抓得住,能不能拿得稳,能不能用合适的力,能不能在接触之后及时调整,决定了机器人是只能演示,还是能真正干活。
这就是灵巧手的价值。
它不是机器人的一个普通配件,而是机器人把智能转化为行动的关键接口。
02 一只灵巧手,难点不只是“手指多”
外界看灵巧手,容易先关注外形:有几根手指、有多少自由度、能不能像人手一样弯曲。
但真正把灵巧手做成产品,难度远不止结构仿生。

第一,是机械结构。
灵巧手要在很小的体积里塞进关节、传动、驱动、电路和传感单元,还要保证强度、寿命和可维护性。做得太复杂,成本和可靠性会出问题;做得太简单,又很难完成精细操作。
第二,是触觉与力控。
机器人不仅要知道“碰到了物体”,还要知道“用了多大力”。抓玻璃杯和抓纸箱不是一回事,捏鸡蛋和拿金属零件也不是一回事。没有稳定的触觉反馈和力控制,灵巧操作很容易变成“不是抓不住,就是抓坏了”。
第三,是动作规划。
人类拿东西时,会自然选择抓取点、调整手指姿态、根据滑动情况补偿力度。机器人要完成同样动作,需要把视觉感知、目标识别、轨迹规划和关节控制连起来。
第四,是数据和训练。
灵巧操作不是写几条固定规则就能解决的。真实世界物体形状太多、状态太多、干扰太多,必须依赖大量操作数据,让系统在不断试错和反馈中提升泛化能力。
所以,灵巧手竞争的本质,是机械工程、AI 控制和数据闭环的系统竞争。
03 伯牙智能的看点:从硬件本体走向操作平台
从公开信息看,伯牙智能并不只是做一只“像人手”的硬件。
它更强调围绕灵巧操作建立完整能力:硬件本体、控制算法、训练数据、开发平台和场景适配。
其中,“高山 S1”灵巧手可以理解为面向机器人末端操作的硬件入口;“天琴”灵巧操作全栈平台,则更像是把硬件、算法、仿真、训练和应用开发串起来的工具底座。
这条路线值得关注。
因为灵巧手如果只卖硬件,很容易陷入参数对比:自由度多少、负载多少、单价多少。但真实客户最终关心的不是参数,而是它能不能稳定完成任务。
比如:
- 能不能抓起不同形状的物体;
- 能不能在接触后调整力度;
- 能不能适配不同机器人本体;
- 能不能通过训练快速迁移到新任务;
- 能不能在真实场景里长期稳定运行。
这就需要灵巧手企业不只懂硬件,还要懂软件、算法、数据和工程交付。
伯牙智能这类公司的机会,也正在这里。
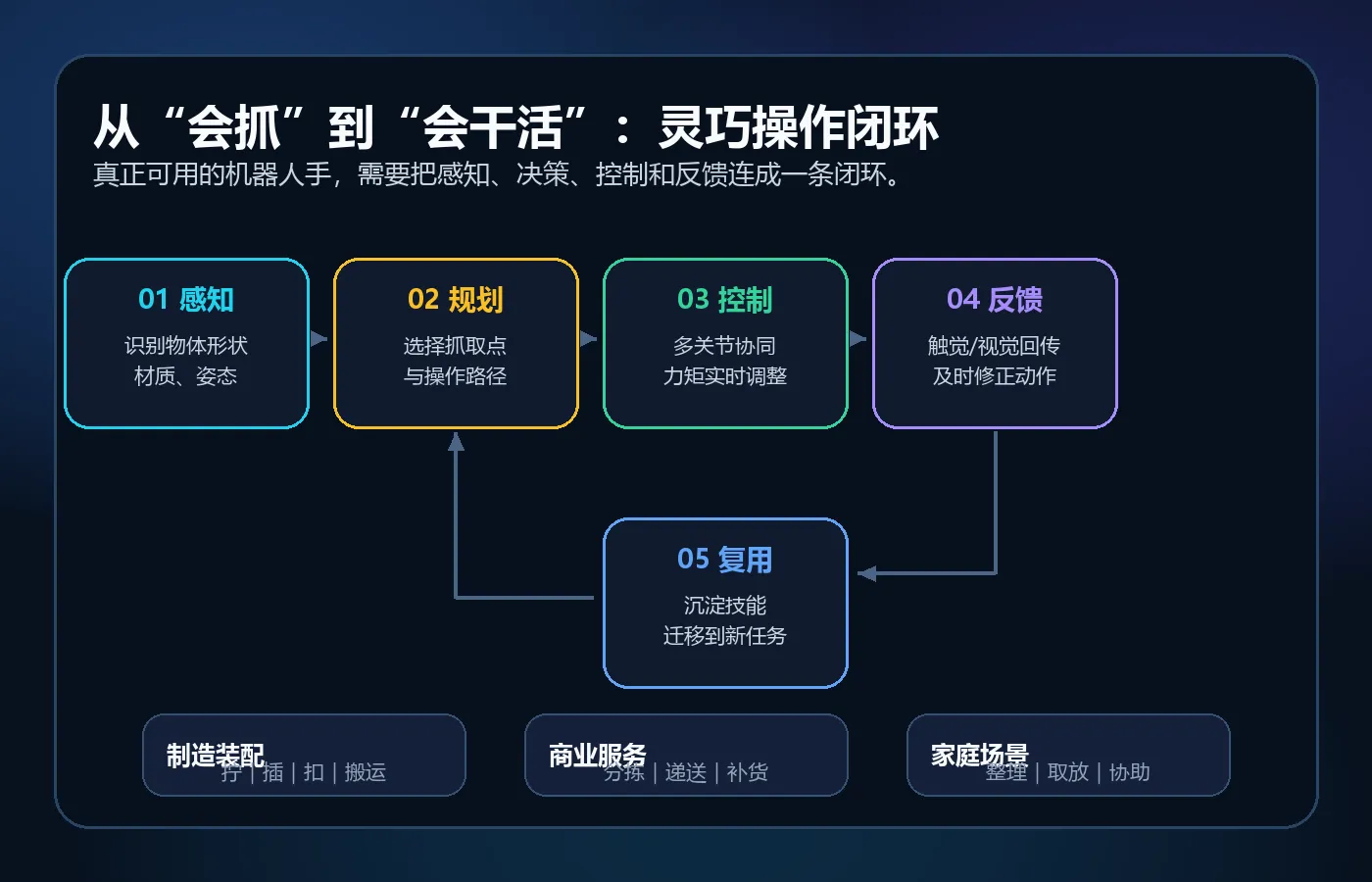
04 从“会抓”到“会干活”,中间隔着一条闭环
灵巧手的产业价值,不是做一个漂亮的抓取演示。
真正难的是把“会抓”变成“会干活”。
一个完整的灵巧操作闭环,至少包括五个环节:
第一,感知。 机器人要知道物体在哪里、是什么形状、材质大概如何、姿态是否稳定。
第二,规划。 系统要根据目标任务选择抓取点、接触方式和操作路径。
第三,控制。 多个关节要协同运动,力度要实时调整,避免滑落、碰撞或损坏物体。
第四,反馈。 视觉、触觉、力觉等信息要回到系统里,帮助机器人修正动作。
第五,复用。 成功经验要沉淀成可迁移的技能,未来遇到相似任务时可以更快完成。
这也是为什么灵巧手越来越像一个“操作系统级”的能力,而不只是机械结构。
谁能把闭环跑通,谁才有机会把灵巧手从实验室推向真实作业现场。
05 灵巧手会先在哪里落地?
短期看,灵巧手最容易先在三类场景验证价值。
第一类是制造业。
制造业场景任务明确、流程相对固定,对效率和稳定性要求高。如果灵巧手能完成装配、分拣、上下料、检测辅助等任务,就有机会形成可量化的商业价值。
第二类是商业服务。
比如零售补货、仓内分拣、餐饮后厨、酒店服务等。这些场景物体变化多,但任务重复度较高,适合逐步训练和迭代。
第三类是家庭与个人服务。
这是想象空间最大的场景,但也是最难的场景。家庭环境高度非结构化,物品杂乱,任务不标准,对安全性和成本也更敏感。因此,它可能不会最先规模化,但长期潜力很大。
对伯牙智能这样的初创公司来说,真正关键的不是“能不能做出灵巧手”,而是能不能找到可复制的落地路径。
06 结语:机器人真正进入现实世界,要靠手完成最后一步
具身智能的故事,不能只讲大脑。
机器人需要理解,需要规划,需要行动,也需要和真实世界发生稳定、细腻、可控的接触。
灵巧手解决的,就是这个接触问题。
它决定机器人能不能从“看懂任务”走向“完成任务”,从“演示能力”走向“生产能力”。
伯牙智能的价值,也正是在这个趋势里被看见:当行业开始从大模型和机器人本体,继续向末端执行、操作数据和任务闭环延伸,灵巧手会成为越来越重要的基础部件。
未来的机器人竞争,不只是谁的大脑更聪明,也不只是谁的腿走得更稳。
还要看谁的手,真的能干活。
AITOP100-AI资讯频道将持续关注AI行业新闻资讯消息,带来最新AI内容讯息。
想了解AITOP100平台其它版块的内容,请点击下方超链接查看
AI创作大赛 | AI活动 | AI工具集 | AI资讯专区 | AI小说
AITOP100平台官方交流社群二维码:











